SRS001

オムニホイールでの全方向移動。ボールを保持するドリブラーとキッカーが付いています。ラジコンで操縦します。
作成の経緯
このロボットは何回か改修を行ったロボットです。- 元は高校時代にロボカップジュニア用に製作
- 大学受験(1回目)が終わってから、高校を卒業するまでの1か月ほどの間にフレームをCNCフライスできれいに作り直す。
- 上記の5年後にテスト用に電子回路を変更
駆動系
ダイセンのオムニホイールとギヤードモーターを使用しています。ギヤ比は100:1で、これぐらい遅くないと狭い室内での操縦は難しいです。この2つは簡単に設置できるのですが、モーターのパワーが小さいこととエンコーダーが付かないことが玉にきずですね。
このタイヤを4つ使っています。
(下の写真はロボット裏側)
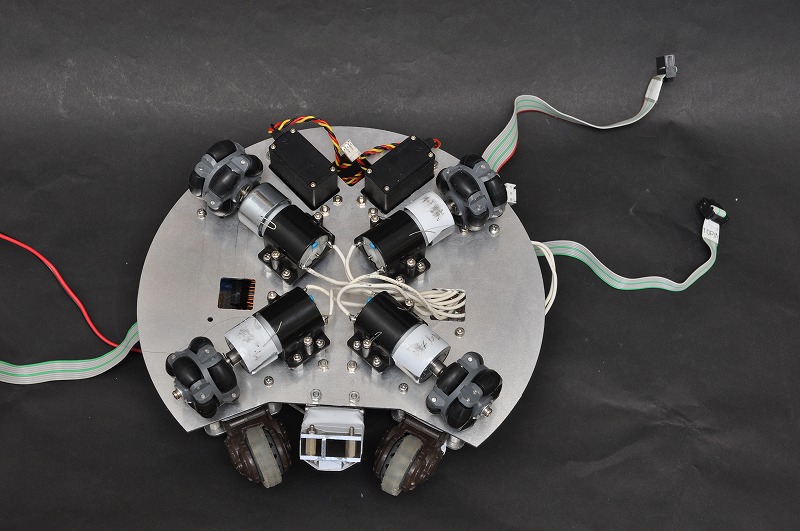
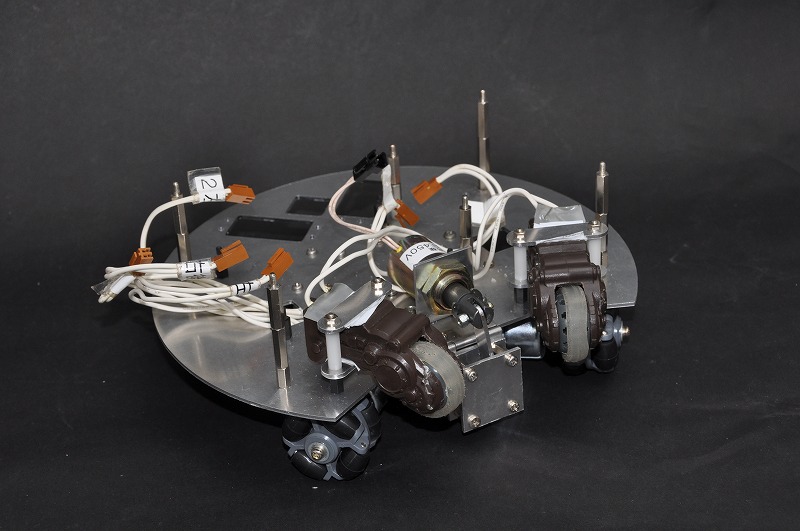
内部
このロボットはボトムプレート(左:下にモーターが付いている)とトッププレート(右:上部にマイコンやバッテリーが付く)のサンドイッチ構造をしています。2枚のプレートの間には電子基板やドリブラー、キッカー等の機構が入っています。
1.ドリブラー
ドリブラーはボールにバックスピンをかけて保持する機構です。一番下の動画でロボットがボールを押しているときだけでなく引いてもボールを離さないのはこれのおかげです。ロボットの前面に小さいタイヤが付いていてこれが回転するだけの機構です。摩擦力を上げるためにシリコンゴムのタイヤが接着されています。

2.キッカー
キッカーはボールを勢いよく蹴りだす装置です。ソレノイドに400Vの電圧を一気にかけててこを引き、板を前に出して蹴ります。ソレノイドの定価は12Vみたいですが、瞬間的な力を得るために400Vを掛けます。(最近のロボカップではルールが厳しくて高電圧を使えないみたいですね。)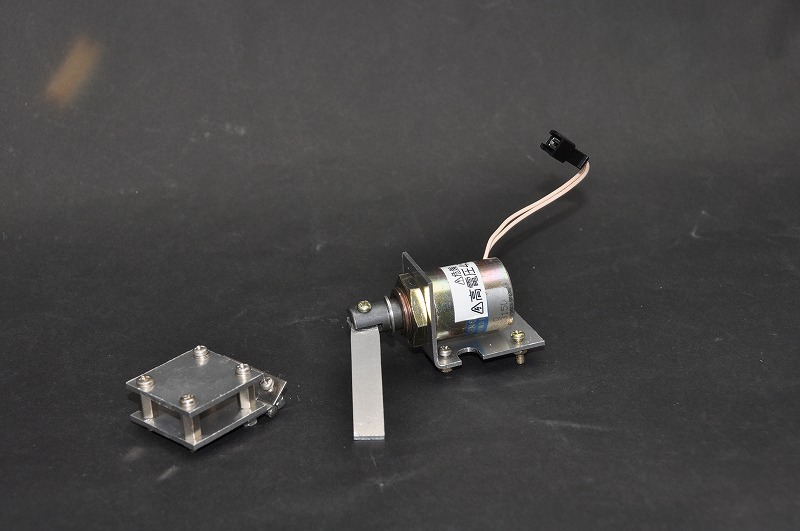
これを本体に以下のように設置します。板の部分がボールを蹴ります。
3.電装系
タイヤとドリブラー用のモータードライバとキッカー用の昇圧回路が入っています。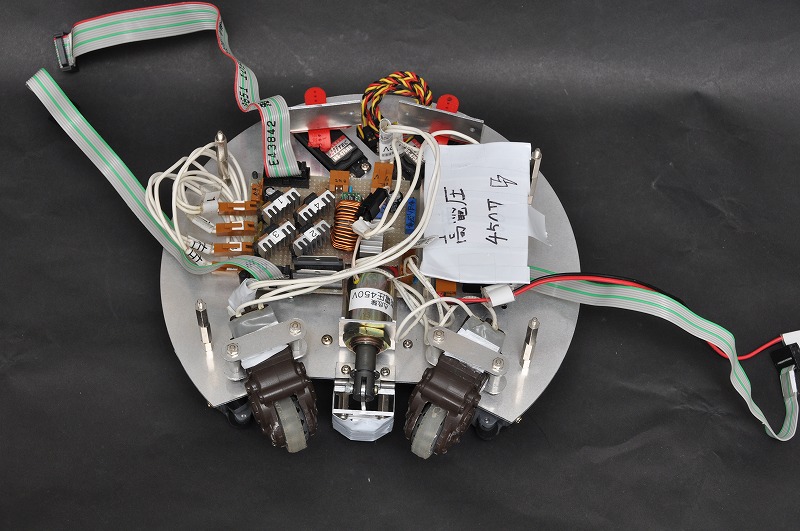
センサー
実験用にPSD距離センサをサーボモーターで首する出来るようにしたものが付いています。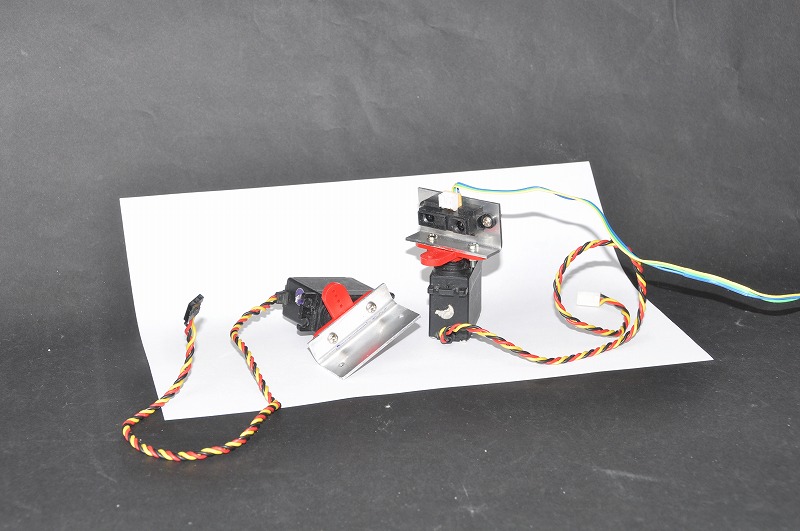
動画
動作デモ初期はUIをMS VisualC#で作っていました。
0 件のコメント:
コメントを投稿