各部の紹介をしていきたいと思います。

概要
6脚で移動する機構の上に旋回するエアガンを乗せたものです。PCからの指令を受けて6脚の各足のモーションを生成し歩行をします。指令はWiFiでまた電源もバッテリーを積むことができるので、完全無線で動くことができます。まずは多脚の移動部の動作。前後左右と旋回を自由に行うことができます。砲塔が乗った状態での動作また遠隔の指示で砲塔の旋回やLED投光器、レーザー照準器などを操作することができます。
最後に搭載されているエアガンの射撃テスト、射撃する前にレーザーで標準をつけています。まだ調整をしていないので レーザーの場所とあっていませんが、1m離れていても直径5cmの円に収まりそうです。
レッグユニット
6脚移動部はほぼ同じレッグユニットを6つつなげることで実現しています。このために各足には互換性があり高い整備性を持ちます。(以下はテスト用の台に接続した状態)
関節部分には動力ユニットであるサーボモーターが入っています。サーボモーターは近藤科学のKRS4031(スピード0.16s/rad、トルク13.0kgm、約7000円)とKRS4034(スピード0.17s/rad、トルク41.7kgm、約15000円)を使用しています。子のサーボモーターはシリアル通信をすることができるために正確な位置の指示や、現在のサーボモーターの状態の取得ができるために、精密な制御ができます。このように2種類のサーボモーターを適宜使い分けることで安価にシステム全体を製作することができます。またサーボモーターが過熱するとモーターの出力が落ちてしまうために、冷却用のファンを搭載しています。

また足先には加重センサ(FSR400)が搭載されています。このために足先に掛かっている加重を各足ごとにセンシングすることができます。今後荒地での歩行を行うときに使用する予定です。このセンサは加重と抵抗値が反比例するためにそのままでは使いにくく。OPアンプを使って加重と比例した電圧が出力されるようにしています。また装飾用のLEDも搭載しています。

制御基板はmbed互換のボードをオリジナルで製作して使っています。 LPC1768を使用しています。mbed互換にしているためにOnlineのmbed compilerやmbedの豊富なライブラリをそのまま使用することができます。ロボットに合わせたオリジナルの基板なので省スペース、省配線でメンテナンス性に貢献しています。

少し古いものですが、レッグユニット単体での動作テストです。マイコンが補完動作を行うために滑らかな脚の動作が実現できました。
ガンユニット
エアガンを操り、砲塔の旋回や、給弾機構、光学系のコントロールを行うユニットです。
エアガンは空圧を扱うための気密性や適切な威力を出す機構など複雑な部分が多いので既製品を使います。市販されているエアガンはBB弾の射出を行うメカボックスを、実銃の形を模した外枠が覆うという構成をとっています。東京マルイの「電動ガンボーイズ」シリーズは通常のエアガンよりも威力が低く、また小型軽量のメカボックスを使用しているために、これを使用することにしました。今回は電動ガンボーイズのG36Cを分解してメカボックスとバレルを手に入れました(ほかのものでも中身は一緒だと思います)。

このメカボックスやバレルは複雑な形をしていて簡単には固定できないので治具を作ってがんユニットに固定をしています。これらの部品の採寸にはだいぶ苦労しました。3次元測定器がないのでノギスで測るのですが、微妙な長さがあったりすると整合性を取るのが大変です。

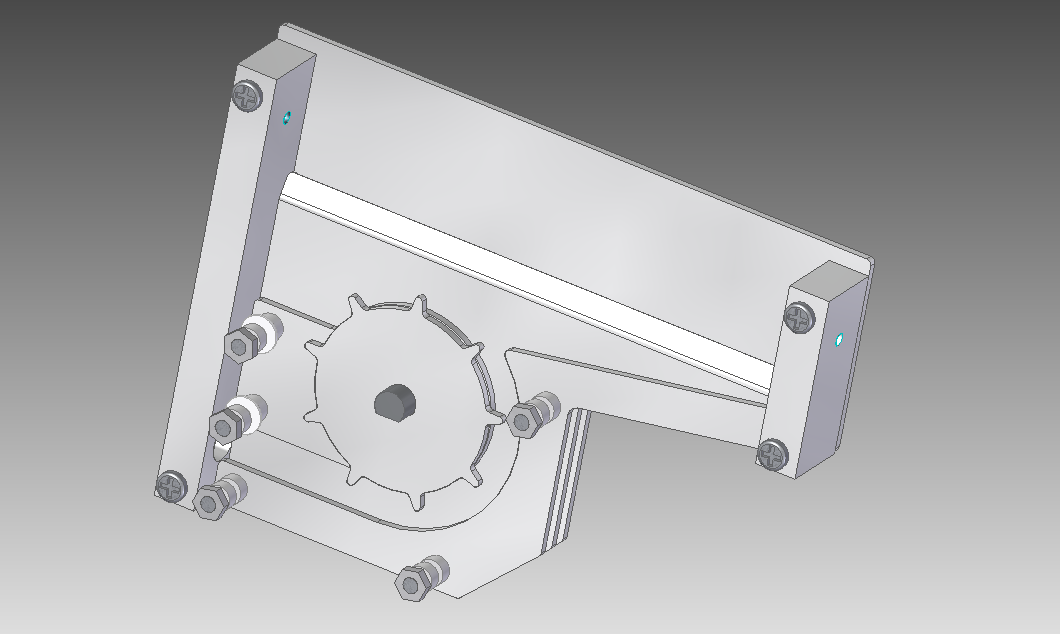
メカボックスと一緒にマガジンも流用しようとしたのですが、マガジンの形状が複雑で固定するのが困難だったこと、付属のマガジンがゼンマイをまいた分しか給弾できないために、給弾を電動化するのと一緒にマガジンを1から設計しなおしました。およそ100発のBB弾をためることができ、歯車状のツメをステッピングモーターで回して給弾をします。マガジンから出たBB弾はステンレス製の引きばねの中を通ってメカボックスに送られます。
これらをmbed互換の専用ボードで制御しています。左側がメイン基板で各種センサーやライトなどが接続されています。右側の縦に長い基板はガンドライバーでメカボックスのモーターの制御とメカボックスのセンサーの入力とつながっています。メカボックスのモーターにはかなりの負荷が掛かっているため、また他の回路に影響を与えるノイズを抑えるために専用のモータードライブ回路を設計しました。

これ以外にガンユニットには光学系としてWebカメラ、標準用レーザー、LED投光器が搭載されています。
ボディーユニット
上記のレッグユニット、ガンユニットを接続する機能を持つほか、電源や全体制御用のPC、正面カメラを搭載しています。レッグユニットを接続できるポイントがいくつかあり、そのうちの6つにレッグユニットを実際に取り付けています。ねじを数本外すだけで、ユニットをボディーユニットから外すことができます。
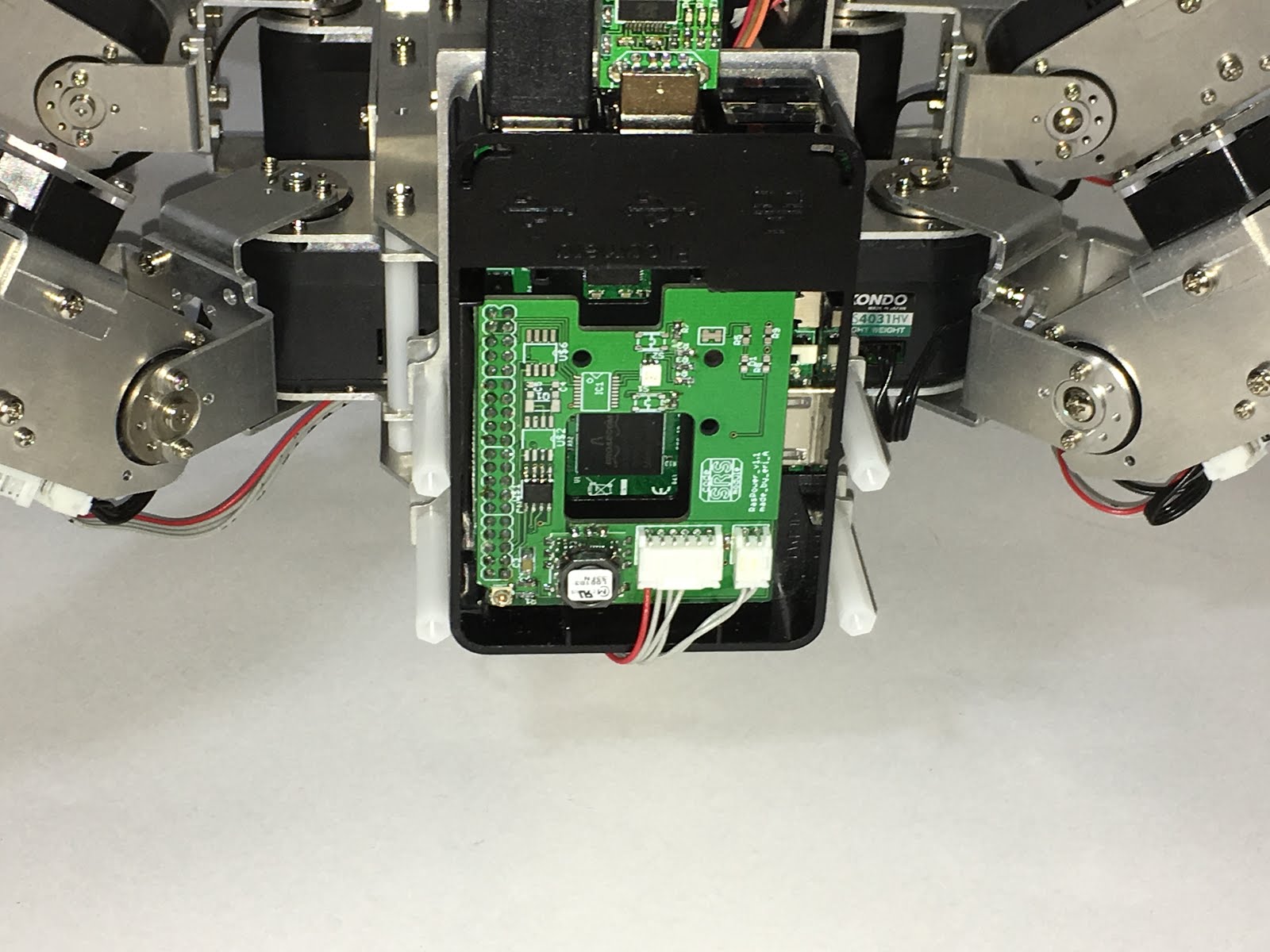
全体制御用に後部にRaspberry Piが搭載しています。今回はRaspberry Piを接続するための治具とアドオンボードを製作しました。アドオンボードは全体のソース電源の12VからRaspberry Pi用の電源を作り、またRaspberry PiのttyターミナルにPCから物理的に接続するコネクタを持ちます。
メカ系製作
メカ系は3D-CADであるSolidEdgeを用いて製作しました。3D-CADを用いれば実物がなくてもパーツをモデリングして組み立てることができます。また既存のパーツとうまく組み合わさるようなパーツの設計も3D-CADを用いれば迅速にできます。
部品の設計が終わったらこれを図面に起こします。私は薄板は外注して業者に製作してもらっていて、厚みのあるブロック材は自分でフライス盤や旋盤を用いて加工をしています。それぞれを目的に合わせて図面を製作します。

これらの加工を終えると以下のようなアルミパーツが出来上がります。これを組み立てればメカパーツの製作は終了です。

電気系製作
電気系はEagleというCADを用います。まず使用したい部品のパーツライブラリを製作し、それを使って回路図を製作します。基本的なパーツについてはEagle自体に入っているのですが、秋葉原で手に入るようなものはあまりないので、骨の折れる作業です。
ここからレイアウトの作業です。電子基板のサイズや外形を引き、その中に納まるように配置をしていきます。

レイアウトが完成したらガーバーデータという形式に変換してプリント基板製造業者に送ります。最近はプリント基板の値段がどんどん安くなっていて、10cm四方程度ですと10ドル+送料ほどで2週間もあれば届きます。届いたプリント基板に部品を乗せると完成です。プリント基板なので量産しやすく、接触不良も起きにくいです。

全体システム
全体的なシステムについて解説していきます。操縦者の手元にコントロールPCがあり、それから発行された指令が無線LAN経由でロボットに乗っているロボットPCに送られます。ロボットPCからUSBポートを通じてロボット内の各マイコンに指令が流れ、マイコンが指示された動作を行います。

0 件のコメント:
コメントを投稿